3.4 Interprocess Communication
- Independent Processes operating concurrently on a systems are those that can neither affect other processes or be affected by other processes.
- Cooperating Processes are those that can affect or be affected by other processes. There are several reasons why cooperating processes are allowed:
- Information Sharing - There may be several processes which need access to the same file for example. ( e.g. pipelines. )
- Computation speedup - Often a solution to a problem can be solved faster if the problem can be broken down into sub-tasks to be solved simultaneously ( particularly when multiple processors are involved. )
- Modularity - The most efficient architecture may be to break a system down into cooperating modules. ( E.g. databases with a client-server architecture. )
- Convenience - Even a single user may be multi-tasking, such as editing, compiling, printing, and running the same code in different windows.
- Cooperating processes require some type of inter-process communication, which is most commonly one of two types: Shared Memory systems or Message Passing systems. Figure 3.13 illustrates the difference between the two systems:
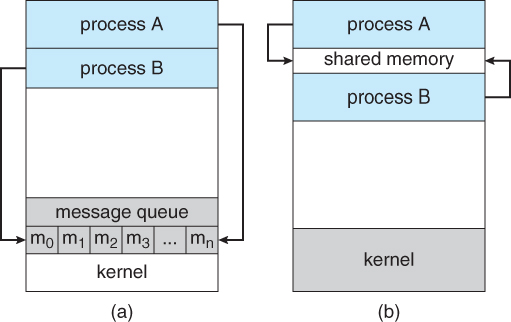
Figure 3.12 - Communications models: (a) Message passing. (b) Shared memory.
- Shared Memory is faster once it is set up, because no system calls are required and access occurs at normal memory speeds. However it is more complicated to set up, and doesn't work as well across multiple computers. Shared memory is generally preferable when large amounts of information must be shared quickly on the same computer.
- Message Passing requires system calls for every message transfer, and is therefore slower, but it is simpler to set up and works well across multiple computers. Message passing is generally preferable when the amount and/or frequency of data transfers is small, or when multiple computers are involved.
3.4.1 Shared-Memory Systems
- In general the memory to be shared in a shared-memory system is initially within the address space of a particular process, which needs to make system calls in order to make that memory publicly available to one or more other processes.
- Other processes which wish to use the shared memory must then make their own system calls to attach the shared memory area onto their address space.
- Generally a few messages must be passed back and forth between the cooperating processes first in order to set up and coordinate the shared memory access.
Producer-Consumer Example Using Shared Memory
- This is a classic example, in which one process is producing data and another process is consuming the data. ( In this example in the order in which it is produced, although that could vary. )
- The data is passed via an intermediary buffer, which may be either unbounded or bounded. With a bounded buffer the producer may have to wait until there is space available in the buffer, but with an unbounded buffer the producer will never need to wait. The consumer may need to wait in either case until there is data available.
- This example uses shared memory and a circular queue. Note in the code below that only the producer changes "in", and only the consumer changes "out", and that they can never be accessing the same array location at the same time.
- First the following data is set up in the shared memory area:
#define BUFFER_SIZE 10typedef struct {
. . .
} item;item buffer[ BUFFER_SIZE ];
int in = 0;
int out = 0;- Then the producer process. Note that the buffer is full when "in" is one less than "out" in a circular sense:
// Code from Figure 3.13item nextProduced;while( true ) {/* Produce an item and store it in nextProduced */
nextProduced = makeNewItem( . . . );
/* Wait for space to become available */
while( ( ( in + 1 ) % BUFFER_SIZE ) == out )
; /* Do nothing */
/* And then store the item and repeat the loop. */
buffer[ in ] = nextProduced;
in = ( in + 1 ) % BUFFER_SIZE;}- Then the consumer process. Note that the buffer is empty when "in" is equal to "out":
// Code from Figure 3.14item nextConsumed;while( true ) {/* Wait for an item to become available */
while( in == out )
; /* Do nothing *//* Get the next available item */
nextConsumed = buffer[ out ];
out = ( out + 1 ) % BUFFER_SIZE;
/* Consume the item in nextConsumed
( Do something with it ) */}3.4.2 Message-Passing Systems
- Message passing systems must support at a minimum system calls for "send message" and "receive message".
- A communication link must be established between the cooperating processes before messages can be sent.
- There are three key issues to be resolved in message passing systems as further explored in the next three subsections:
- Direct or indirect communication ( naming )
- Synchronous or asynchronous communication
- Automatic or explicit buffering.
3.4.2.1 Naming
- With direct communication the sender must know the name of the receiver to which it wishes to send a message.
- There is a one-to-one link between every sender-receiver pair.
- For symmetric communication, the receiver must also know the specific name of the sender from which it wishes to receive messages.
For asymmetric communications, this is not necessary.- Indirect communication uses shared mailboxes, or ports.
- Multiple processes can share the same mailbox or boxes.
- Only one process can read any given message in a mailbox. Initially the process that creates the mailbox is the owner, and is the only one allowed to read mail in the mailbox, although this privilege may be transferred.
- ( Of course the process that reads the message can immediately turn around and place an identical message back in the box for someone else to read, but that may put it at the back end of a queue of messages. )
- The OS must provide system calls to create and delete mailboxes, and to send and receive messages to/from mailboxes.
3.4.2.2 Synchronization
- Either the sending or receiving of messages ( or neither or both ) may be either blocking or non-blocking.
3.4.2.3 Buffering
- Messages are passed via queues, which may have one of three capacity configurations:
- Zero capacity - Messages cannot be stored in the queue, so senders must block until receivers accept the messages.
- Bounded capacity- There is a certain pre-determined finite capacity in the queue. Senders must block if the queue is full, until space becomes available in the queue, but may be either blocking or non-blocking otherwise.
- Unbounded capacity - The queue has a theoretical infinite capacity, so senders are never forced to block.